


実操作デモンストレーション
ダブルベルト中空設計により、搬送物はベルトに沿って移動し、正確に位置決めされるため、ロボットアームのグリッパーによる搬送物のピックアップと配置が容易になります。さらに、中央の隙間にあるブロッキングシリンダーが排出速度を制御するため、搬送プロセスの柔軟性が向上し、搬送物の安定性と生産効率が確保されます。
 ホーム
ホーム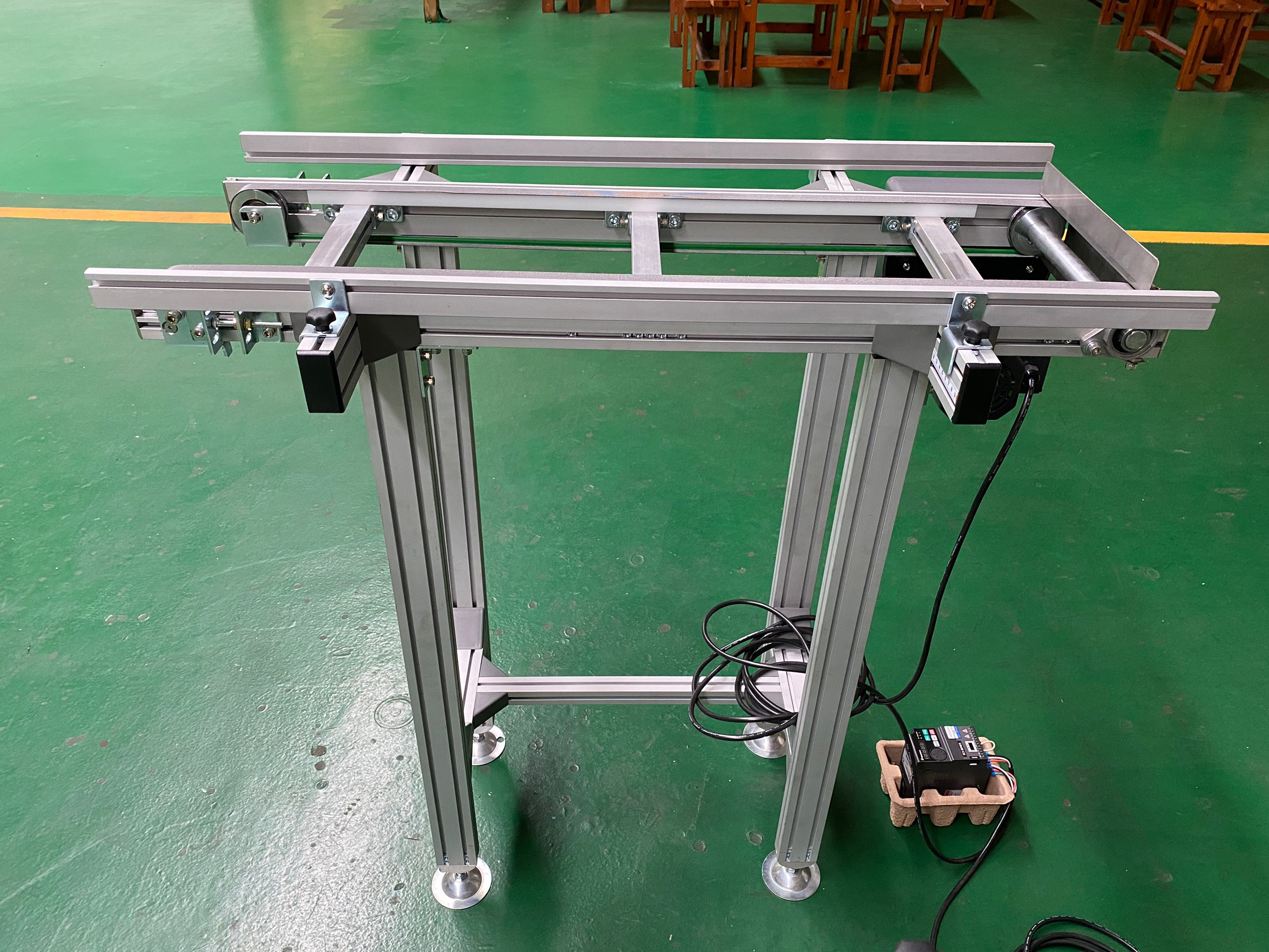
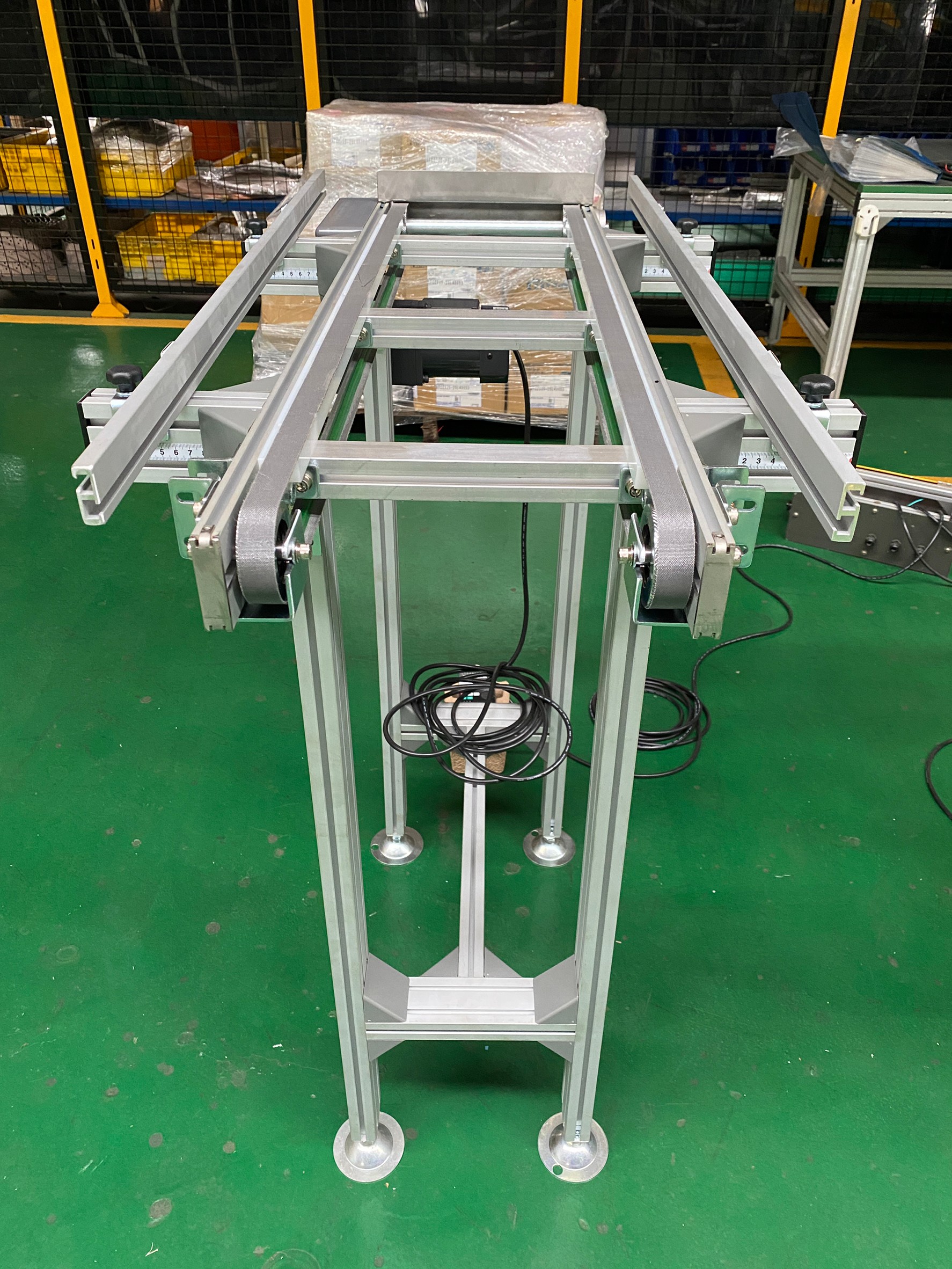
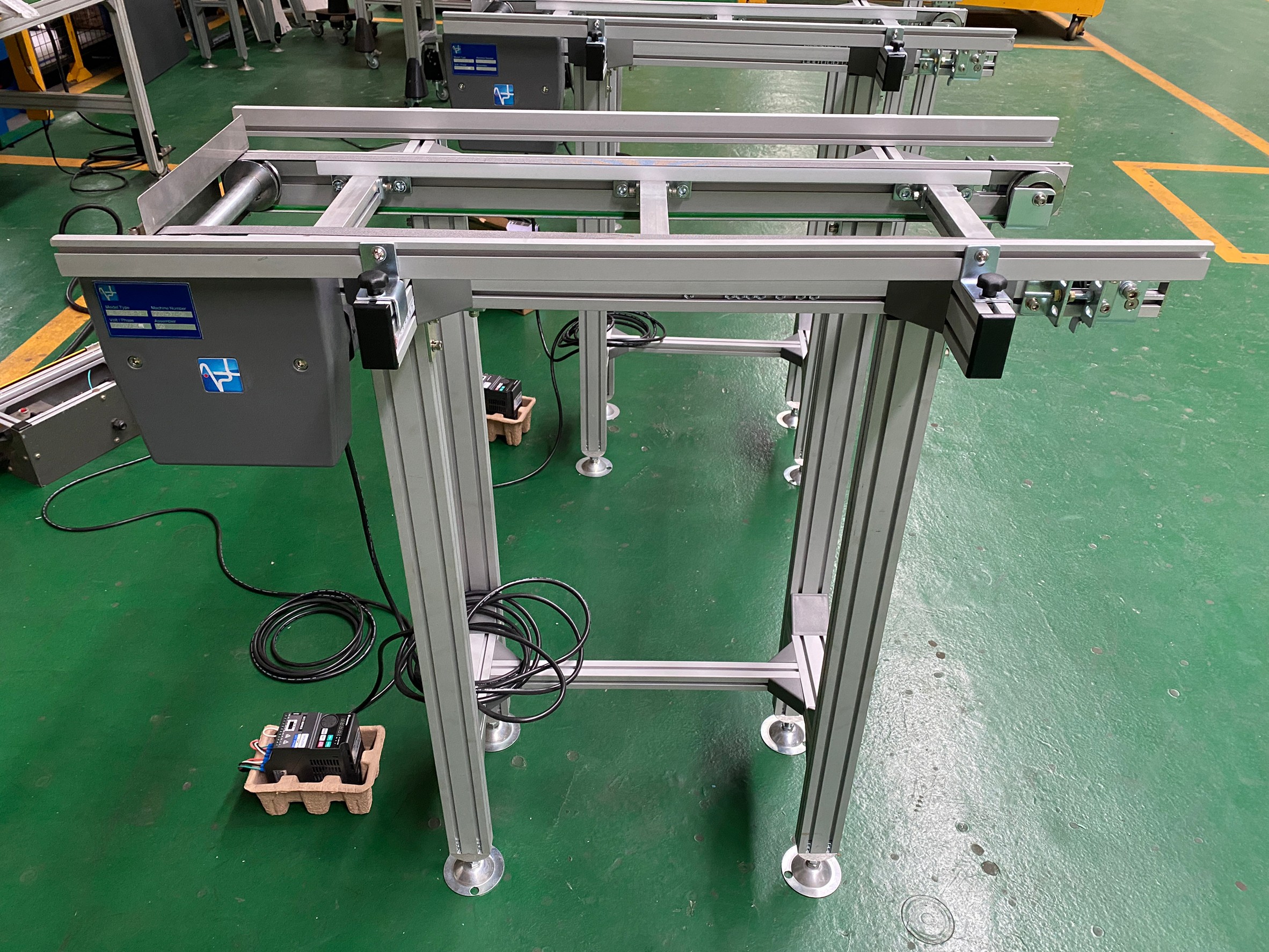


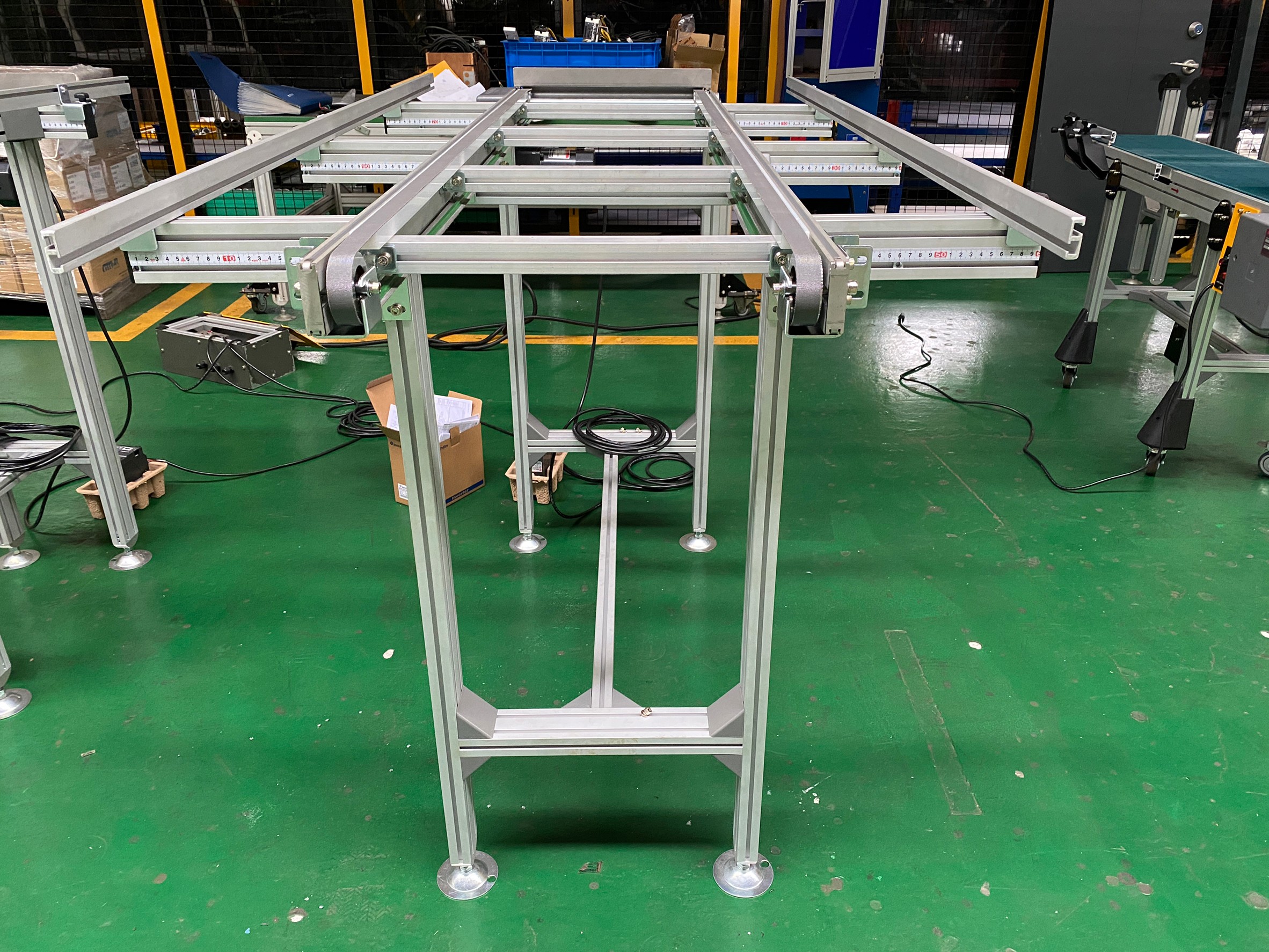


ダブルベルト中空設計により、搬送物の正確な位置決めが可能になり、自動グリップの効率が向上します。
ダブルベルトコンベアは自動化生産ラインに適しており、特に正確なグリップと位置決めが必要な用途に適しています。
ダブルベルト中空設計により、搬送物はベルトに沿って移動し、正確に位置決めされるため、ロボットアームのグリッパーによる搬送物のピックアップと配置が容易になります。さらに、中央の隙間にあるブロッキングシリンダーが排出速度を制御するため、搬送プロセスの柔軟性が向上し、搬送物の安定性と生産効率が確保されます。

